How To...
Triangulation
- Triangulation refers to the process of determining the
location of a point by forming triangles to it from known points, using
only angle measurements.
- Trilateration (True Range Multilateration) is a method
of determining the location of a point using multiple known distance
measurements from known points.
- Triangulateration involves the use of both angle and distance
measurements to determine the location of a point.
- Apply the following techniques to find the location of unknown
points using only a Garmin GPSr and a creative interpretation of the
above
methods.
- Intersection by Bearing
- Intersection by Distance
- Intersection of Circle
- Midpoint
- Equilateral Triangle
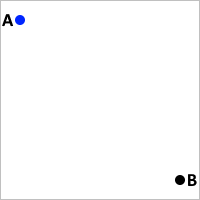
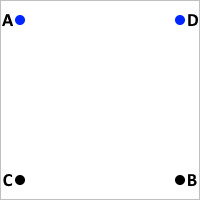
1. Intersection by Bearing
1.1. Find the point of intersection between two bearings from two points
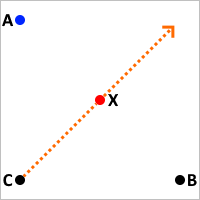
1.1.1. Find the coordinates for a distant landmark within visual range
 |
 |
 |
 |
| Landmark (X) in visual range |
Save current location
as Waypoint (B) |
Project a waypoint beyond
Landmark (X) |
Save Waypoint (A) |
| |
|
|
|
 |
 |
 |
 |
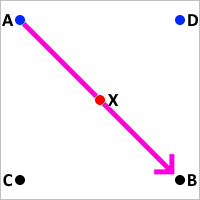
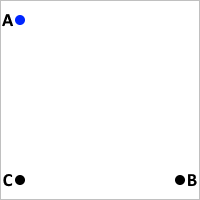
Move to a new location
and save Waypoint (C) |
Project a waypoint beyond
Landmark (X) |
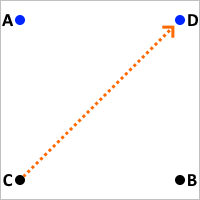
Save Waypoint (D) |
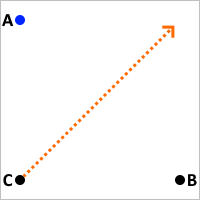
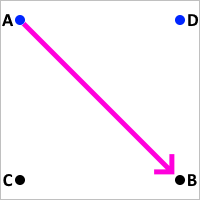
Create new route on GPSr... |
| |
|
|
|
 |
 |
 |
 |
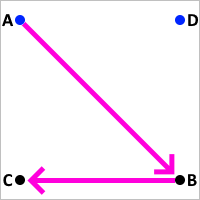
| ...from Waypoint (A) to (B)... |
...add Waypoint (B) to (C)... |
...finish Waypoint (C) to (D) |
Mark Waypoint (X) at
route intersection |
1.1.2. Find the coordinates for an unknown waypoint where two
locations and bearings are known
 |
 |
 |
 |
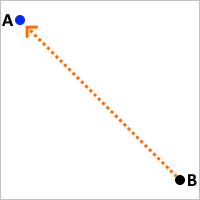
Move to first location
and save as Waypoint (B) |
Project a waypoint at
specified Bearing |
Save Waypoint (A) |
Move to second location... |
| |
|
|
|
 |
 |
 |
 |
Save second location
as waypoint (C) |
Project a waypoint at
specified Bearing |
Save Waypoint (D) |
Create new route on GPSr... |
| |
|
|
|
 |
 |
 |
 |
| ...from Waypoint (A) to (B)... |
...add Waypoint (B) to (C)... |
...finish Waypoint (C) to (D) |
Mark Waypoint (X) at
route intersection |
1.2. Find the point of intersection between two
bearings to two points
- Modify each bearing between 001° and 180° by adding 180°
- Modify each bearing between 181° and 360° by subtracting 180°
|
|
|
|
|
Move to first location
and save as Waypoint (B) |
Project a waypoint at
specified Bearing |
Save Waypoint (A) |
Move to second location... |
| |
|
|
|
|
|
|
|
|
Save second location
as waypoint (C) |
Project a waypoint at
specified Bearing |
Save Waypoint (D) |
Create new route on GPSr... |
| |
|
|
|
|
|
|
|
|
| ...from Waypoint (A) to (B)... |
...add Waypoint (B) to (C)... |
...finish Waypoint (C) to (D) |
Mark Waypoint (X) at
route intersection |
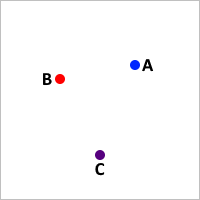
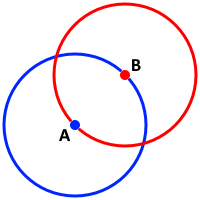
2. Intersection by Distance
2.1. Find the point of intersection between multiple points with known distances
- Find the coordinates for an unknown waypoint where two locations and distances are known (Bilateration)
- Find the coordinates for an unknown waypoint where three locations and distances are known (Trilateration)
 |
 |
 |
 |
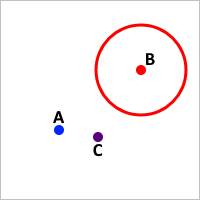
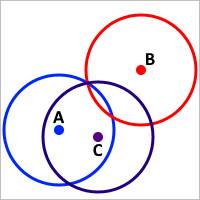
Two known locations,
points (A) and (B) |
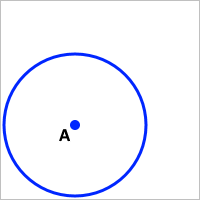
Create Proximity Alert at
specified distance for point (A) |
Create Proximity Alert at
specified distance for point (B) |
Two solutions exist where
Proximity (A)
and (B)
intersect |
| |
|
|
|
 |
 |
 |
 |
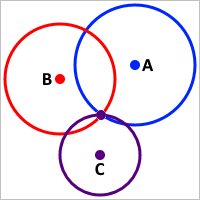
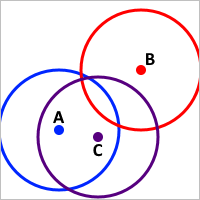
Three known locations,
points (A), (B) and (C) |
Two solutions
exist where
Proximity (A)
and (B)
intersect |
Create Proximity Alert at
specified distance for point (C) |
Mark Waypoint (X) where
Proximity (A)(B)(C) intersect |
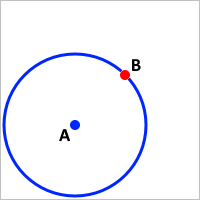
3. Intersection of Circle
3.1. Find the points of intersection on a circle with a line by bearing
 |
 |
 |
 |
Save 'Circle' location
as Waypoint (A) |
Move to 'Bearing' location
and save as Waypoint
(B) |
Create Proximity Alert at
specified distance for point (A) |
Project a waypoint at
specified Bearing |
| |
|
|
|
 |
 |
 |
 |
| Save
Waypoint (C) |
Create new route on GPSr... |
...from Waypoint (B) to
(C) |
Two solutions
exist where
(B)(C)
intersects
(A) |
4. Midpoint
4.1. Find the midpoint between two known points
 |
 |
 |
 |
Two known locations,
points (A) and (B) |
Create new route on GPSr
from waypoint (A) to (B) |
Create Proximity Alert (A)
at
½ distance of Route (A)(B) |
Create Proximity Alert (B)
equal to Proximity Alert (A) |
| |
|
|
|
 |
 |
 |
 |
Adjust both Proximity Alerts
in equal increments if
they
do not overlap precisely |
Proximity Alerts (A)
and (B)
exhibit correct overlap |
Mark location where
Proximity Alerts (A)
and (B)
intersect Route (A)(B) |
Saved Waypoint (X)
is
(A)(B)
midpoint |
4.2. Find the midpoint between three known points
 |
 |
 |
 |
Three known locations,
points (A), (B) and
(C) |
Create new route on GPSr
from waypoint (A) to (B)
and record route distance |
Create new route on GPSr
from waypoint (B) to
(C)
and record route distance |
Create new route on GPSr
from waypoint (C) to (A)
and record route distance |
| |
|
|
|
 |
 |
 |
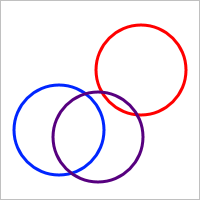 |
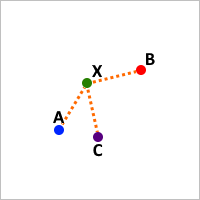
Solution will be between
longest route
(A)(B)
and
shortest route (C)(A) |
Create Proximity Alert for
any point using a value
between
(A)(B)
and (C)(A) |
Create Proximity Alerts for
remaining points using
the same value |
If Proximity Alerts do not
all overlap, increase the
value and repeat process |
| |
|
|
|
 |
 |
 |
 |
Create a Proximity Alert for
any point using new value |
Create Proximity Alerts for
remaining points using
the same value |
If all Proximity Alerts overlap
but do not intersect at same
point, reduce value and repeat |
Create a Proximity Alert for
any point using new value |
| |
|
|
|
 |
 |
 |
 |
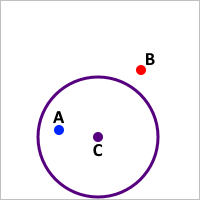
Create Proximity Alerts for
remaining points using
the same value |
Mark Waypoint
(X)
where all Proximity Alerts
intersect at same point |
Saved Waypoint (X)
is
(A)(B)(C) midpoint |
Create Proximity Alert
(X)
using final
(A)(B)(C) value
to verify solution |
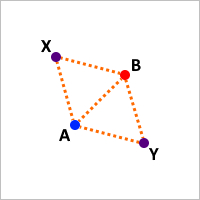
5. Equilateral Triangle
5.1. Find coordinates to form an equilateral triangle from two known points
 |
 |
 |
 |
Two known locations,
points (A) and (B) |
Create new route on GPSr
from waypoint (A) to (B) |
Find total distance
for Route (A)(B) |
Create Proximity Alert (A)
using distance (A)(B) |
| |
|
|
|
 |
 |
 |
 |
Adjust Proximity Alert (A)
distance as required for precise
intersection with point (B) |
Create Proximity Alert (B)
equal to Proximity Alert (A) |
Mark Waypoints
(X) and
(Y)
where Proximity Alerts
(A) and (B)
intersect |
(A)(X)(B)
and
(A)(Y)(B)
form Equilateral Triangles |